RE:EVOLUTION IN SEISMIC SEABED SURVEYING

GEONODE – NEXT GEN SEABED STATION
GEONODE — autonomous self-pop-up sea-bottom recorders is developed for work at a depth up to 7000 meters either in brine and fresh water.
COMBINATION OF UNIQUE FEATURES
THREE-DIRECTIONAL GEOPHONE 1
HYDROPHONE 2
SONAR MODEM 3

4 SEISMIC RECORDER
5 SELF-SOLUBLE ECO-ANCHOR
6 WIRELESS DATA TRANSFER
SEA-BOTTOM RECORDERS GEONODE —
THE BEST SOLUTION FOR SEISMIC DATA COLLECTING BY SEARCH OF HYDROCARBONS
GEONODE – OPERATION DESCRIPTION
AUTONOMOUS SELF-POP-UP SEABED RECORDER GEONODE
1
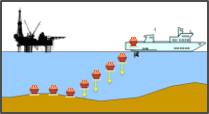
arrangement of stations in the set area
2
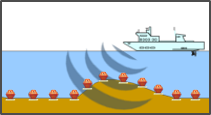
«shooting-through» by seismic source point and data recording
3
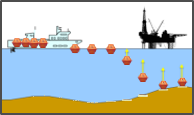
operated self-pop-up, wireless data reading, preparation of stations for new arrangement
SEA-BOTTOM RECORDERS GEONODE —
THE BEST SOLUTION FOR SEISMIC DATA COLLECTING BY SEARCH OF HYDROCARBONS
GEONODE – UNIQUE DEVICE AND COMPETITIVE ADVATAGE
vertical geophone and hydrophone increase survey density and frequency rate when image on multiple water waves is created
RECORD CLEANING IN THE CASE OF RINGING AND TRANSFORMED WAVES

FAST POP-UP AND ARRANGEMENT
Just initial delay depends on depth of sea during arrangement
CLEAR DATA
S waves are not able to travel through water and can't be recorded by towed sensors
3D COMPONENT GEOPHONE AND HYDROPHONE
Seabed structure images in PP and PS waves

MODULARITY
fast replacement of damaged components provide stability in the case of equipment loss and failure
REMOTE READOUT
high-speed WUSB wireless obtained data copying after pop-up
BROAD BAND DATA
Deep basin image creation
FOUR COMPONENT RECORDING ON THE SEABED
images of basins in one contrast in S waves of resistance and speeds
images through Gas "clouds" where data of P waves is not represented
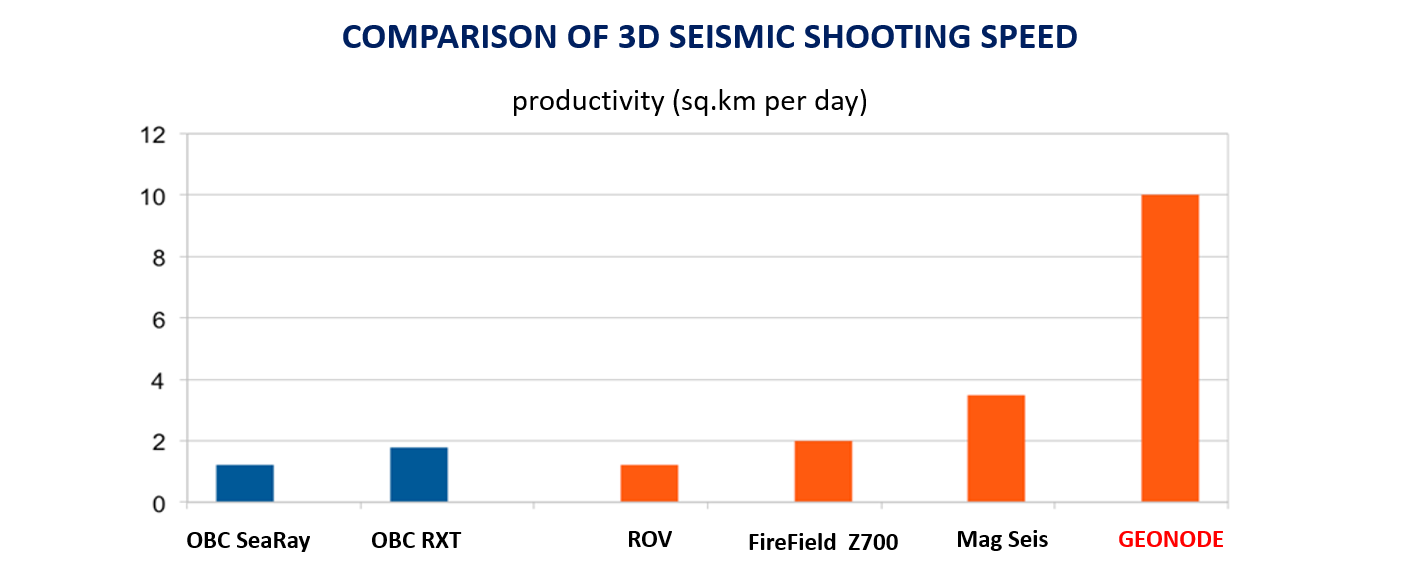
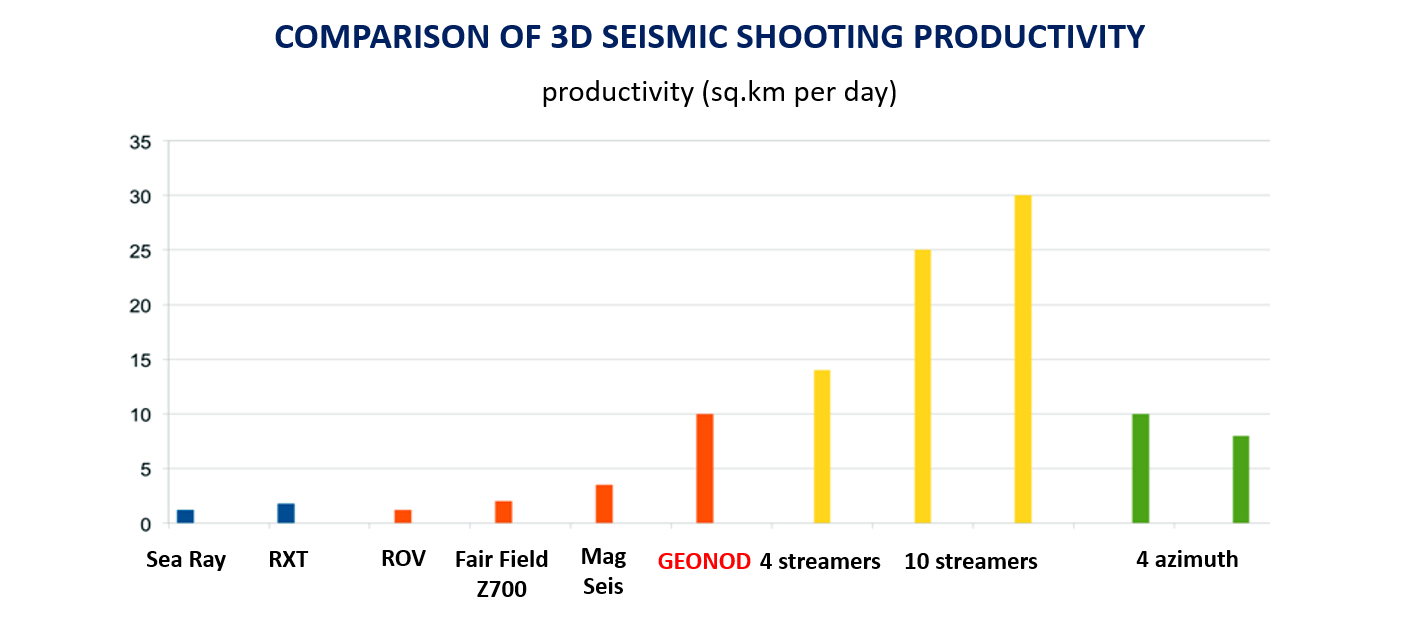
COMPARISON OF MARINE SEISMIC SURVEY TECHNOLOGIES
| Marine survey technologies | Multi-azimuth | Large distance | Areas with obstacles | Shooting time | Shooting cost | |
|---|---|---|---|---|---|---|
| Towed sensors * | Narrow azimuth | NO | Limited | No | 1 | 1 |
| Rich azimuth | YES | YES | No | 3 | 4 | |
| Seabed cable ** | YES | Limited | Limited | 2-3 | 4-5 | |
| Seabed stations | Arranged by robots | YES | YES | YES | 8 | 10 |
| GEONODE *** | YES | YES | YES | 1.8 | 0.8 | |
*

specially equipped expensive vessel is required.
Seabed cable operation risk:
Seabed cable operation risk:
- impossibility of work at the increased waves (weather)
- High accident risk during the work on shoal
- Noise of sensor towage
**
Operation – any hard geological conditions, including conditions when sensor towing is impossible
***
GEONODE allows faster, more precisious and cheaper shooting than other marine technologies
COMPARISON OF MARINE SEISMIC SURVEY TECHNOLOGIES
Seabed cables
Seabed stations
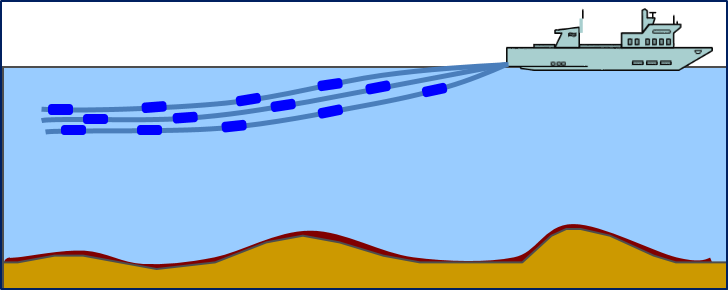
NAZ towed sensors
MAZ
Spiral path *
*
Seismic surveys by towed sensors on spiral path along the consecutive, continuously passing each other circular trajectories.
Coil Shooting. New method minimizes or completely excludes a time-out of plying and provides high-quality data on reflections in all range of azimuths.
Coil Shooting. New method minimizes or completely excludes a time-out of plying and provides high-quality data on reflections in all range of azimuths.
COMPARISON OF MARINE SEISMIC SURVEY TECHNOLOGIES
|
SEISMO SHELF Russia |
FairfieldNodal Z700 USA |
FairfieldNodal Z3000 USA |
Seabird CASE Abyss Norway |
CGGVeritas Trilobit France |
Geospace Technologies OBX USA |
GEONODE | |
|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
|
| Device type | Deployment free falling | Connects by cable-rope | Deployment by robots | Deployment by robots | Deployment by robots | Connects by cable-rope | Deployment free falling |
| Permissible depth | 0 – 500 metres | 0 – 700 metres | 0 – 3000 metres | 0 – 3000 metres | 0 – 3000 metres | 0 – 3450 metres | 0 – 7000 metres |
| Loaded weight of one device | 32,5 kg | 30 kg | 97 kg | 150 kg | 59 kg | 15,9 kg | 23 kg |
| Autonomous work time | 30 days | 15 days | 60 days | 60 days | 75 days | 30 days | 90 days |
| Vessel requirements | Any | Adaptation required | Adaptation required | Special | Special | Special | Any |
| Turn over to the vessel laboratory | After deployment and recover | After deployment and recover | After deployment and recover | After deployment and recover | After deployment and recover | After deployment and recover | Free mode |
| Copying of obtained data | Wired | Wired | Wired | Wired | Wired | Wired | Wireless |
| Data quality | Full azimuth 4 components | Full azimuth 4 components | Full azimuth 4 components | Tight azimuth 1 component | Tight azimuth 1 component | Tight azimuth 1 component | Full azimuth 4 components |
| Productivity (square km per 24 hours) | 5 sq.km | 2 sq.km | 1.2 sq.km | 1.2 sq.km | 1.2 sq.km | 2 sq.km | 10 sq.km |
| Device location on the sea surface | No | No | No | No | No | No | Radio beacon with GPS, flag and lamp for day and night detection |
| Time synchronization | External GPS receiver for manual connection with device after opening of the case | External GPS receiver for manual connection with device | External GPS receiver for manual connection with device | External GPS receiver for manual connection with device | External GPS receiver for manual connection with device | External GPS receiver for manual connection with device | Integrated receiver GPS/GLONASS automatically carries out synchronization |
| Data backup on the vessel | No | No | No | No | No | No | Yes |
| Advatage | No | Relatively dense inline selection in comparison with other seabed systems | Working in deep water – up to 3000 m. One vessel required. | Working in deep water – up to 3000 m. One vessel required. | Working in deep water – up to 3000 m. One vessel required. | Relatively dense inline selection in comparison with other seabed systems | Universal arrangement: line, cross. Free fall system and self-pop-up. Fast arrangement, pulling up and rearrangement |
| Disatvantage | Case should be opened for data copying after pulling up | Two vessels are necessary for work. Manual recharge – 8 hours. | Robots are necessary for deployment. It is big and heavy equipment. Small number of devices in the line of arrangement. Battery recharge takes 30 hours | Robots are necessary for deployment. It is big and heavy equipment. Small number of devices in the line of arrangement. | Robots are necessary for deployment. It is big and heavy equipment. Small number of devices in the line of arrangement. | Partially manual arrangement. Additional noise because of rope. | Disatvantages found in competitive devices are not revealed |
GEONODE – NEXT GEN SEABED STATION
high precision registration of seismic wave direction — images of the target horizons in P/PS waves

work in any weather conditions. GEONODE doesn't remove noise from a sea surface as stations aren't wired with a surface.

the new standard exceeding existing technologies — azimuthal 3D/4C survey

the ecological anchor
—– Water soluable after shooting

fidelity — horizontal component allowing to obtain exact

low energy consumption — a long life at the bottom without replacement/recharge of batteries

immersion range of GEONODE station: 0 - 7000 meters
Full contact of each station with a bottom of any water area

3D seismic survey in the Arctic — conditions of ice navigation

Rich azimuth shooting of the target horizons (remote source-receiver) from all directions. Unlimited aperture. Choice* is carried out in accordance with geological task
absence of risks and restrictions at shall depths, water areas with obstacles and intensive fishing activity, transit zones, including with the tidal effect
